








Учебный комплект JetAuto ROS на базе Jetson Nano с сенсорным экраном с лидарной камерой глубины, поддержкой картографирования и навигации SLAM
0
Арт. ИМ000687490
434 610 ₽
Рассчитать доставку
Нашли дешевле?
Хочу в подарок
Гарантия 5 лет
Характеристики
Цена актуальна на дату
?
:
02.04.2025
Какого числа актуализировали цену товара
Описание
Учебный комплект JetAuto ROS на базе Jetson Nano с сенсорным экраном с лидарной камерой глубины, поддержкой картографирования и навигации SLAM
Цена действительна только для интернет-магазина и может отличаться от цен в розничных магазинах
Общие сведения:
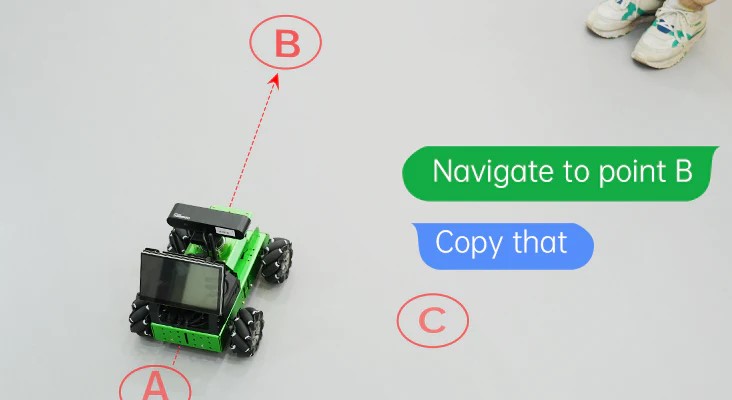
Продвинутый набор для разработки автономных мобильных роботов предназначенный для обучения ROS. Он оснащен NVIDIA Jetson Nano, высокопроизводительным моторами, лидаром, 3D-камерой глубины и 7-дюймовым экраном. Картографирование и навигация, планирование пути, отслеживание и предотвращение препятствий, автономное вождение, распознавание человеческих черт, соматосенсорное взаимодействие и голосовое взаимодействие. JetAuto использует лидар для обнаружения окружения в режиме реального времени, обеспечивая как одноточечную, так и многоточечную навигацию. Он может перепланировать маршрут, чтобы избежать препятствия и продолжить движение. JetAuto может обеспечить навигацию для нескольких транспортных средств, планирование пути и интеллектуальное предотвращение препятствий.Возможности набора:
- NVIDIA Jetson Nano может запускать основные платформы глубокого обучения, такие как TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet.
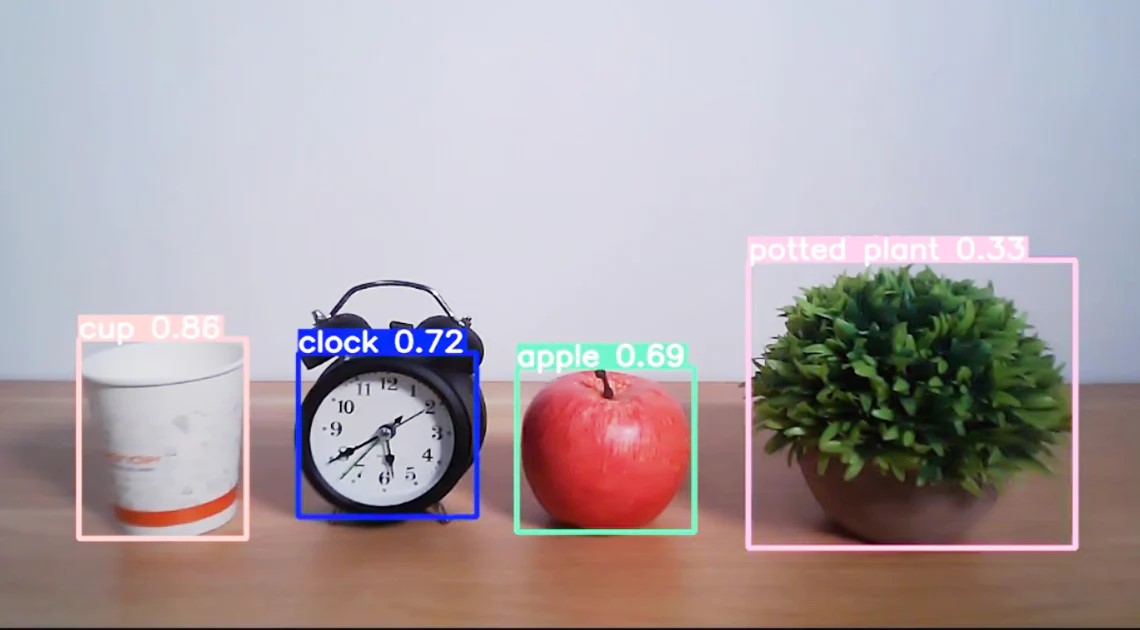
- JetAuto на базе Jetson Nano может реализовывать распознавание изображений, обнаружение и позиционирование объектов, оценку позы, семантическую сегментацию, интеллектуальный анализ.
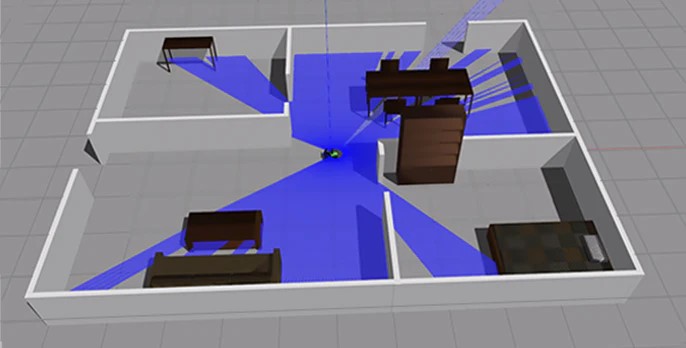
- JetAuto оснащен высокопроизводительным лидаром, который поддерживает картографирование с использованием различных алгоритмов, включая Gmapping, Hector, Karto и Cartographer.
- Возможность реализовать планирование пути, навигацию по фиксированной точке, а также обход препятствий во время навигации.
- Возможность отслеживать препятствие в режиме реального времени во время навигации. Таким образом, он может перепланировать маршрут, чтобы избежать препятствия и продолжить движение.
- Используя алгоритм RRT, JetAuto Pro может завершить картографирование исследования, сохранить карту и самостоятельно вернуться к исходной точке, поэтому нет необходимости в ручном управлении.
- Камера глубины поддерживает 3D-картографирование двумя способами: чистое RTAB-видение и объединение видения, а также лидар, который позволяет JetAuto перемещаться и избегать препятствий, как на 3D-карте, так и в реальных условиях.
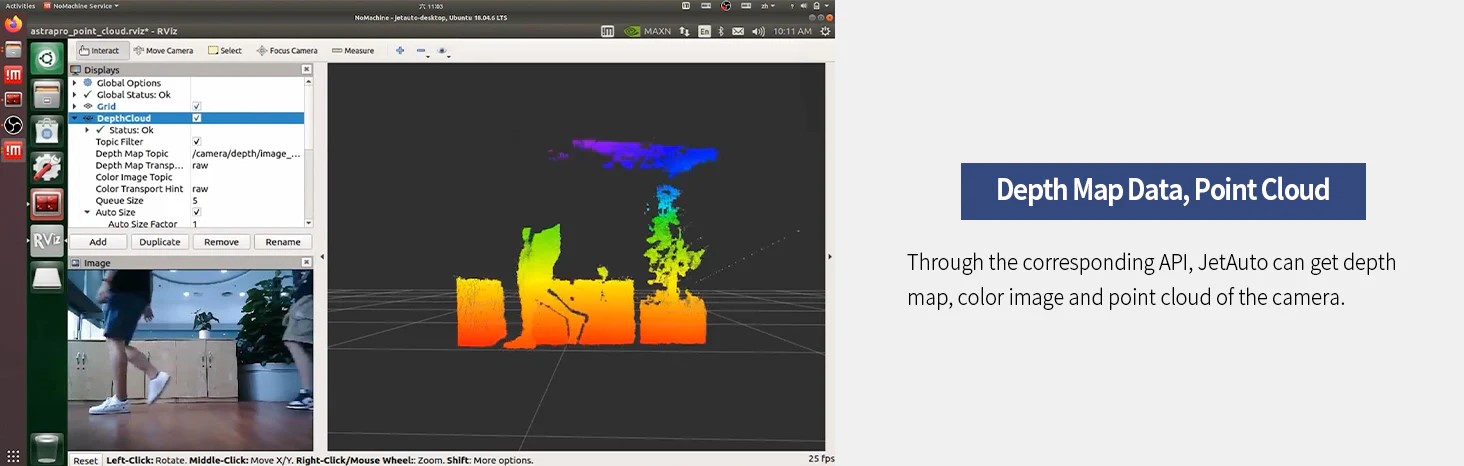
- ORB-SLAM — это платформа SLAM с открытым исходным кодом для монокулярных, бинокулярных камер и камер RGB-D, которая способна вычислять траекторию камеры в реальном времени и реконструировать трехмерное окружение. А в режиме RGB-D можно получить реальный размер объекта через соответствующий API JetAuto может получить карту глубины, цветное изображение и облако точек камеры.
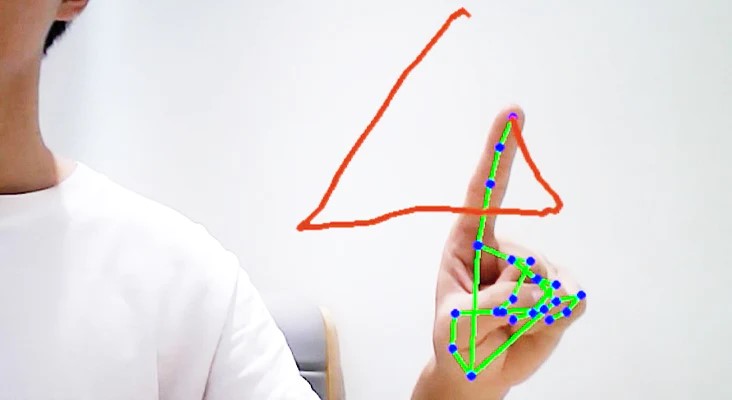
- На основе платформы MediaPipe JetAuto может выполнять распознавание человеческого тела, кончиков пальцев, лиц, 3D-обнаружение и многое другое.
- Используйте сетевой алгоритм YOLO и библиотеку моделей глубокого обучения для распознавания объектов.
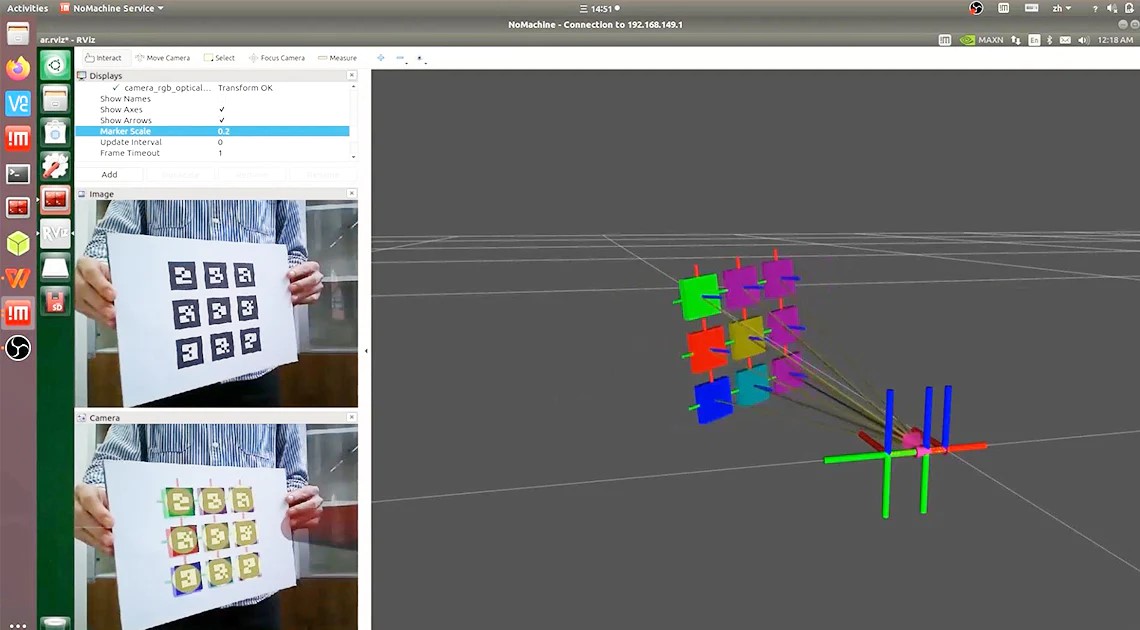
- Опираясь на алгоритм фильтрации KCF, робот может отслеживать выбранную цель. JetAuto способен распознавать и отслеживать назначенный цвет, а также одновременно распознавать несколько QR кодов и их координаты.
- Возможность работать с кинематической имитационной моделью URDF.
- 6-микрофонная матрица отлично справляется с локализацией источника звука в дальней зоне, распознаванием голоса и голосовым взаимодействием. По сравнению с обычным микрофонным модулем он может реализовывать более продвинутые функции.
- Возможность связи между несколькими машинами JetAuto может обеспечить навигацию для нескольких транспортных средств, планирование пути и интеллектуальное предотвращение препятствий.
Уровни обучения:
Исследовательский уровень: Знакомство со сложной кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков.Продвинутый уровень: Изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки, картография, распознавание направления источника звука. Способы использования роботов и глубокого обучения для автоматизации различных процессов. Визуализация облака точек
Состав:
Загрузка отзывов...
Цена актуальна на дату
?
Какого числа актуализировали цену товара
02.04.2025
Оплачивайте покупки удобным способом. В интернет-магазине доступно 3 варианта оплаты:
- Наличные при самовывозе или доставке курьером. Специалист свяжется с вами в день доставки, чтобы уточнить время и заранее подготовить сдачу с любой купюры. Вы подписываете товаросопроводительные документы, вносите денежные средства, получаете товар и чек.
- Безналичный расчет при самовывозе или оформлении в интернет-магазине: карты МИР, Visa и MasterCard. Чтобы оплатить покупку, система перенаправит вас на сервер системы ASSIST. Здесь нужно ввести номер карты, срок действия и имя держателя.
- ЮMoney при онлайн-заказе. Для совершения покупки система перенаправит вас на страницу платежного сервиса. Здесь необходимо заполнить форму по инструкции.
Экономьте время на получении заказа. В интернет-магазине доступно 4 варианта доставки:
- Курьерская доставка работает с 9.00 до 19.00. Когда товар поступит на склад, курьерская служба свяжется для уточнения деталей. Специалист предложит выбрать удобное время доставки и уточнит адрес. Осмотрите упаковку на целостность и соответствие указанной комплектации.
- Самовывоз из магазина. Список торговых точек для выбора появится в корзине. Когда заказ поступит на склад, вам придет уведомление. Для получения заказа обратитесь к сотруднику в кассовой зоне и назовите номер.
- Постамат. Когда заказ поступит на точку, на ваш телефон или e-mail придет уникальный код. Заказ нужно оплатить в терминале постамата. Срок хранения — 3 дня.
- Почтовая доставка через почту России. Когда заказ придет в отделение, на ваш адрес придет извещение о посылке. Перед оплатой вы можете оценить состояние коробки: вес, целостность. Вскрывать коробку самостоятельно вы можете только после оплаты заказа. Один заказ может содержать не больше 10 позиций и его стоимость не должна превышать 100 000 р.

